Nature has lengthy served as a supply of inspiration for scientific improvements. Many animals have developed defensive options reminiscent of skins, shells, and scales to guard themselves from predators. As a result of protecting mechanisms are important in each organic organisms and engineered techniques, a variety of these options have already been adopted in fashionable applied sciences. Just lately, researchers from the Division of Mechanical and Aerospace Engineering at North Carolina State College drew inspiration from the armadillo and its distinctive self-defense mechanism.
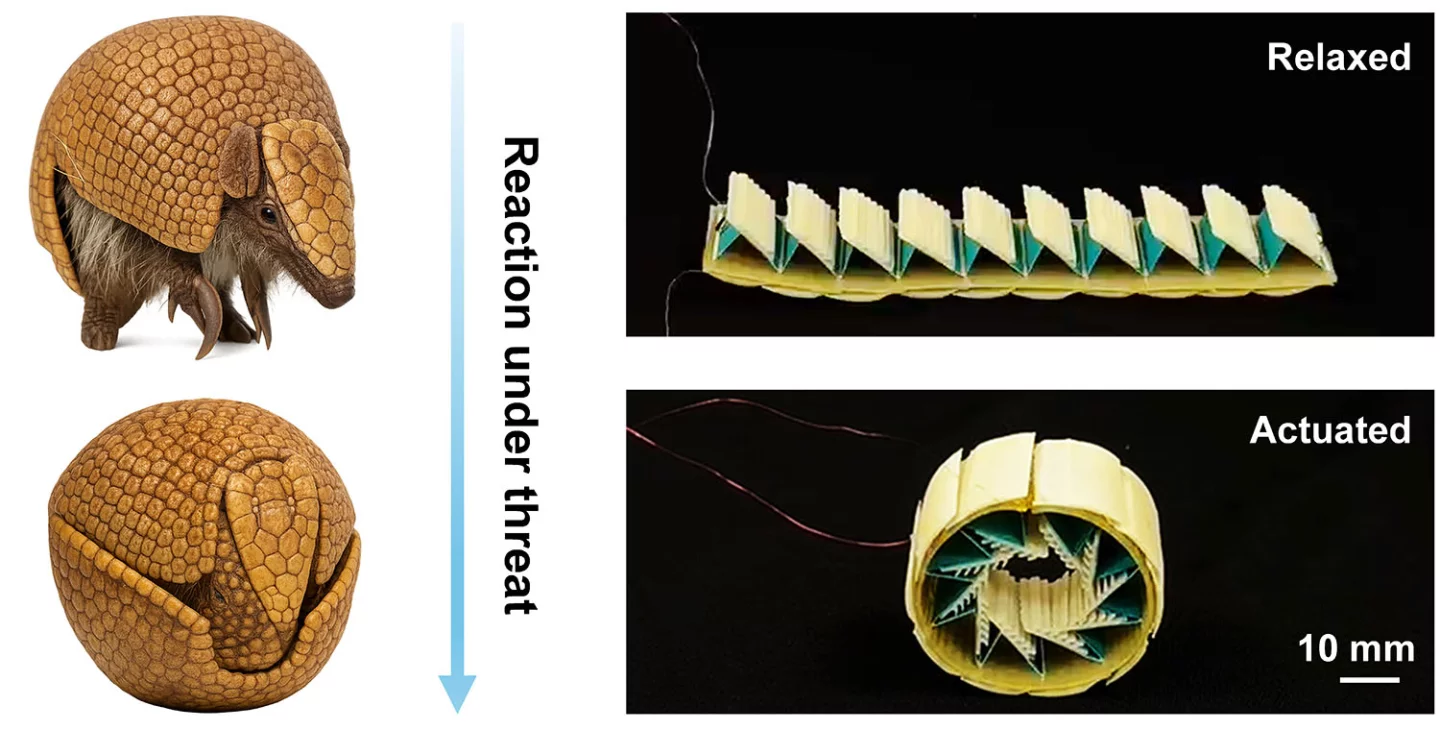
When an armadillo senses hazard, it rapidly prompts its muscle tissues and reconfigures its entire physique right into a inflexible, enclosed sphere. Its armor-like outer plates act as a protect, whereas its backbone helps the physique from inside, maintaining it in a spherical form. Utilizing this idea, the group developed a protecting shell for fragile digital units that may routinely activate when a risk is detected. The know-how is known as the morpho-interlocking protecting module (MIPM).
This method is related to area exploration, search-and-rescue missions, and private protecting wearable applied sciences, the place digital units – reminiscent of robots – need to be light-weight, versatile, and on the similar time resistant to break.
Jianyu Zhou, NC State College
Most beforehand developed bioinspired protecting techniques have lacked one essential element: built-in sensing-actuation loops, which implies they might not routinely and independently reply to exterior threats. Addressing this limitation turned a key problem for the researchers.
On the core of the know-how is a three-layered construction, the place every layer serves an essential operate.
The outer layer consists of a number of segments created from 3D-printed resin. Ten of these segments are able to withstanding roughly 10 newtons of pressure. The center layer is essentially the most complicated, because it accommodates the sensing and actuation system that detects a risk and triggers protecting mode. It consists of 4 parts: a liquid-crystal elastomer (LCE); a pressure sensor created from an elastic polymer embedded with silver nanowires; a layer of Kapton tape that expands when heated; and eventually, a skinny conductive cloth layer that serves as a heater. The interior layer, or endoskeleton, is made of industrial quality paper folded right into a collection of ridges.
When the pressure sensor detects a pressure, it sends a sign to a management unit, which prompts an influence supply and sends it to the heater layer. Because the heater warms, the LCE layer contracts whereas the Kapton tape expands, forcing the whole MIPM construction to bend and curl right into a protecting sphere – identical to an armadillo’s defensive shell.
Not like actual armadillos, the endoskeletal parts of the robotic system can’t be absolutely bonded alongside the origami-inspired interface, as a result of curling requires some area between the segments to make sure their motion. This turned one other problem for the analysis group, which was finally met.
After testing, the system was proven to carry out successfully, nevertheless it’s essential to notice that these outcomes have been obtained beneath managed circumstances. To organize the know-how for real-world circumstances, there’s nonetheless some work that must be carried out. This contains making certain that sensors stay steady in excessive temperatures, excessive humidity, and dusty environments. Apart from that, the group can also be planning to enhance wi-fi connectivity, reminiscent of Bluetooth, to allow dependable communication between sensors and management techniques.
A paper on the analysis has been printed within the journal Science Advances.
Supply: North Carolina State College